| m11 | m12 | m13 |
| m21 | m22 | m23 |
| m31 | m32 | m33 |
And the position (in world space) [px, py, pz]
You want to place Spaceship 2 directly in front of Spaceship 1 (in Spaceship 1's reference frame), 20 units away, pointing towards Spaceship 1. Spaceship 1 and spaceship 2 should have the same up vector.
Give the rotation matrix (in world space) and the position (in world space) of Spaceship 2
| m11 | m12 | m13 |
| m21 | m22 | m23 |
| m31 | m32 | m33 |
And the position (in world space) [px, py, pz]
You wish to place a camera 10 units directly to the right of the character, pointing at the character (that is, looking at the character's right shoulder), with the same up vector as the character.
Give the rotation matrix (in world space) and the position (in world space) of the camera.
| m11 | m12 | m13 |
| m21 | m22 | m23 |
| m31 | m32 | m33 |
And the position (in world space) [px, py, pz]
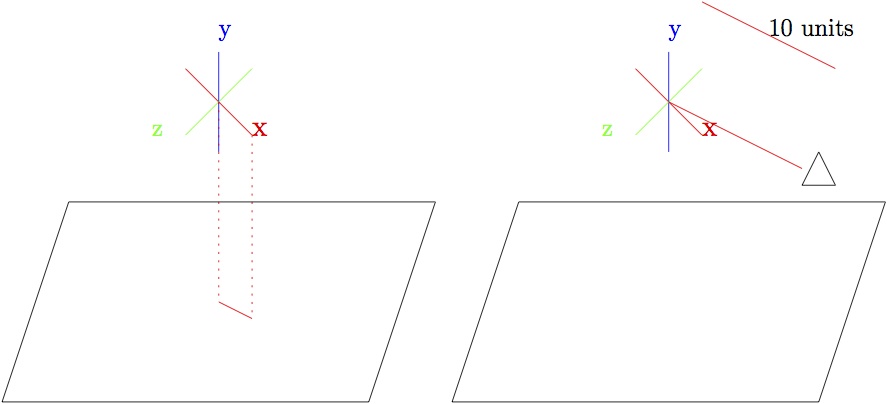
The ground is perpendicular to the world up vector. You wish to place a camera 10 units away from the character, along the line you get when you project the x axis to the ground plane. The camera should have the same up vector as as the world, and be pointed at the character. (See diagram) You can assume that [m11, m12, m13] != [0, 1, 0] and [m11, m12, m13] != [0, -1, 0] (so that x has a non-zero projection to the ground plane).
| m11 | m12 | m13 |
| m21 | m22 | m23 |
| m31 | m32 | m33 |
after applying a transform M, we are left with:
| -m11 | -m12 | -m13 |
| -m31 | -m32 | -m33 |
| m21 | m22 | m23 |
Does the transformation M contain a reflection?
- [w, (x, y, z)] and [-w, (x, y, z)]
- [w, (x, y, z)] and [w, (-x, -y, -z)]
- [w, (x, y, z)] and [-w, (-x, -y, -z)]
- [w, (x, y, z)] and [w, (-x, y, z)]
- [w, (x, y, z)] and [w, (x, -y, z)]
- [w, (x, y, z)] and [w, (x, y, -z)]
- [w, (x, y, z)] and [w, (-x, -y, z)]
- [1, (0, 0, 0)]
- [0, (0, 1, 0)]
- [1/sqrt(2), (1/2, 1/2, 0)]
Ogre::Vector3 shipPos; Ogre::Quaternion shipOrientation;The spaceship has an orbiting satelite whose position and orientation (relative to the spaceship) are:
Ogre::Vector3 satelitePosLocal; Ogre::Quaternion sateliteOrientationLocal;
- Give code to calculate the position and orientation of the satelite in world space:
Ogre::Vector3 satelitePosGlobal = ... Ogre::Quaternion sateliteOrientationGlobal = ...
- You have a point in satelite space:
Ogre::Vector3 pointInSateliteSpace;
Give code to transform that point into world space:Ogre::Vector3 pointInWorldSpace = ...
- You have a point in world space:
Ogre::Vector3 pointInWorldSpace;
Give code to transform that point into satelite space:Ogre::Vector3 pointInSateliteSpace = ...
class foo
{
foo(int a, char *b, char *c) : x(a) {
strcpy(y,b);
z = new char[strlen(c) + 1];
strcpy(z,c);
}
int x;
char y[10];
char *z;
};
class bar
{
bar(int g, char * h, char *i) : d(g, h, i)
{
e = new foo(g, h, i);
}
foo d;
foo *e;
};
int main()
{
bar v(3, "hello", "there");
bar *vPtr = new bar(5, "test", "string");
// Point A
}
Show the contents of the stack and heap at Point A
#includeclass A { public: void P1() {printf("P1 in A\n");} virtual void P2() {printf("P2 in A\n");} virtual void P3() {printf("P3 in A\n");} }; class B : public A { public: void P1() {printf("P1 in B\n");} void P2() {printf("P2 in B\n");} }; class C : public B { public: void P1() {printf("P1 in C\n");} void P2() {printf("P2 in C\n");} void P3() {printf("P3 in C\n");} }; int main() { A aVar; B bVar; C cVar; A *aPtr = new C(); B *bPtr = new C(); aVar.P1(); aVar.P2(); aVar.P3(); printf("--------\n"); bVar.P1(); bVar.P2(); bVar.P3(); cVar.P1(); cVar.P2(); cVar.P3(); printf("--------\n"); aPtr->P1(); aPtr->P2(); aPtr->P3(); bPtr->P1(); bPtr->P2(); bPtr->P3(); printf("--------\n"); aVar = cVar; aVar.P1(); aVar.P2(); aVar.P3(); printf("--------\n"); bVar = cVar; aPtr = &(bVar); aPtr->P1(); aPtr->P2(); aPtr->P3(); }
r = vABCHowever, you now realize that your system uses column vectors instead of row vectors! Give a formula for the equivalent column vector r' (in terms of the column vector v', and the transformation matrices A, B, and C),