MAC Layer
Some images taken from http://www.cs.uni-paderborn.de/index.php?id=1119&L=1
Overview
- MAC protocols coordinate access to a shared medium
- Recall: Ethernet uses CSMA/CD for this purpose
- Wireless sensor networks introduce additional challenges
- energy efficiency
- transmission range
Design Constraints/Challenges
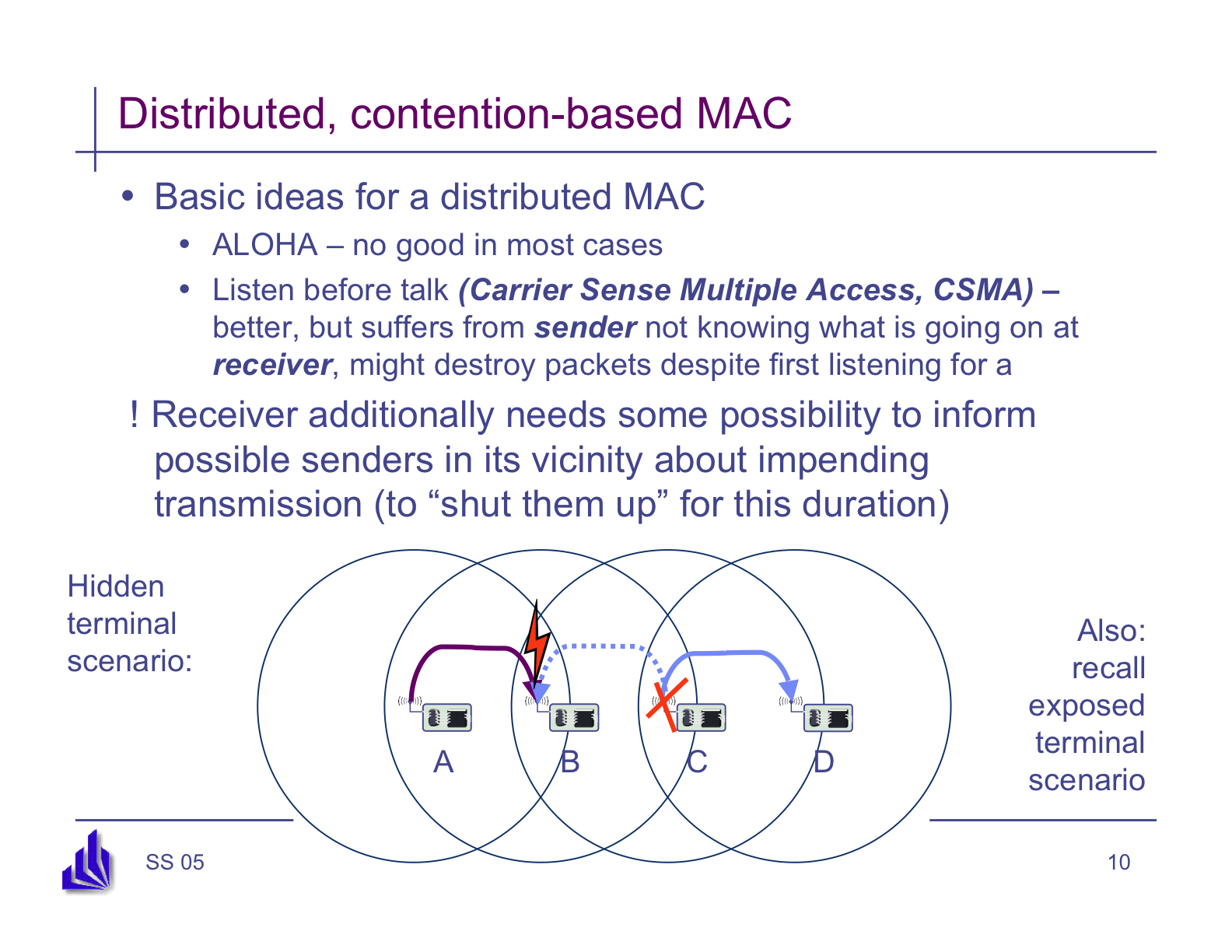
- Hidden/exposed terminal problem
- CSMA at sender fails to detect collision at receiver - A wants
to transmit to B and cannot hear that C is transmitting a message heard
by B
- CSMA at sender detects potential collision that will not be actual collision at receiver - B transmits to A and C transmits to D
- Energy considerations
- collisions - collisions cost energy since packets that collide are useless and must be retransmitted
- overhearing - wireless is inherently broadcast and a node will spend energy receiving packets destined for other nodes
- overhead - MAC control messages incur overhead
- idle listening - a node in "listening" state consumes energy
Taxonomy of Solutions
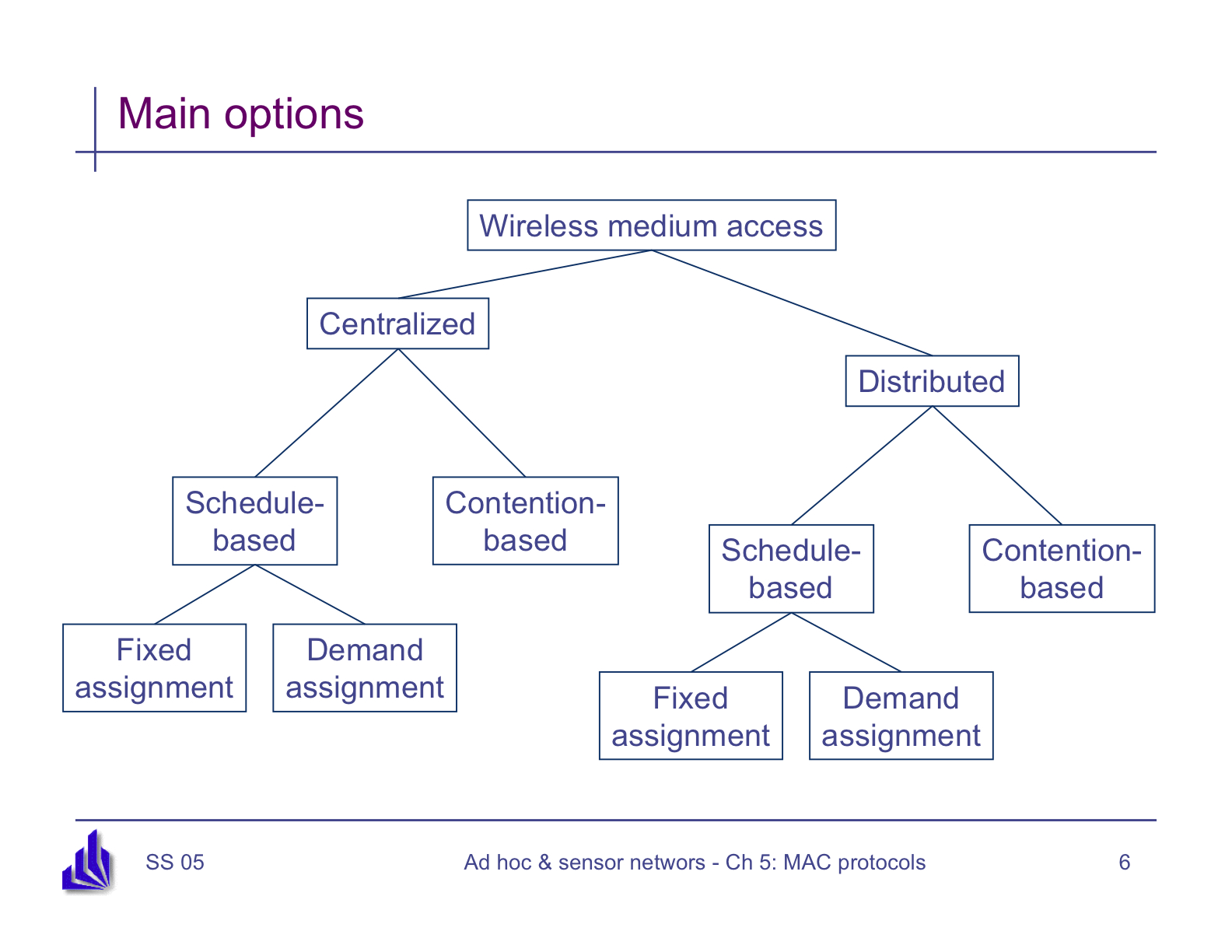
- Centralized solutions dedicate a central authority to coordinate who accesses the medium and when.
- Pros: easy to implement
- Cons: either require battery-powered node to act as coordinator or will drain battery of sensor selected as coordinator
- Schedule-based solutions assign specific transmission/reception
slots. Fixed assignment divides resources equally among nodes as
in TDMA. Demand assignment allocates resources on a short-term
basis as in token ring.
- Pros: avoid idle listening, schedules can avoid collisions
- Cons: overhead required to set up schedules, time synchronization required, may not adapt to changing load
- Contention-based solutions leave nodes to compete with each other for resources when needed as in CSMA and ALOHA.
- Pros: limited synchronization required
- Cons: collisions possible, hidden/exposed terminal problems
Common Solutions: RTS/CTS and Busy Tone
Contention-based solutions encounter the hidden/exposed terminal
problems discussed above. Two commonly-discussed solutions are
the following:
- Busy Tone - two frequency channels are used, one for data and one
for control. When a node starts to receive a packet destined for
it, it emits a signal on the control channel that ends when the
reception is finished. Before transmitting, a node senses the
control channel and only transmits if there is no busy tone.
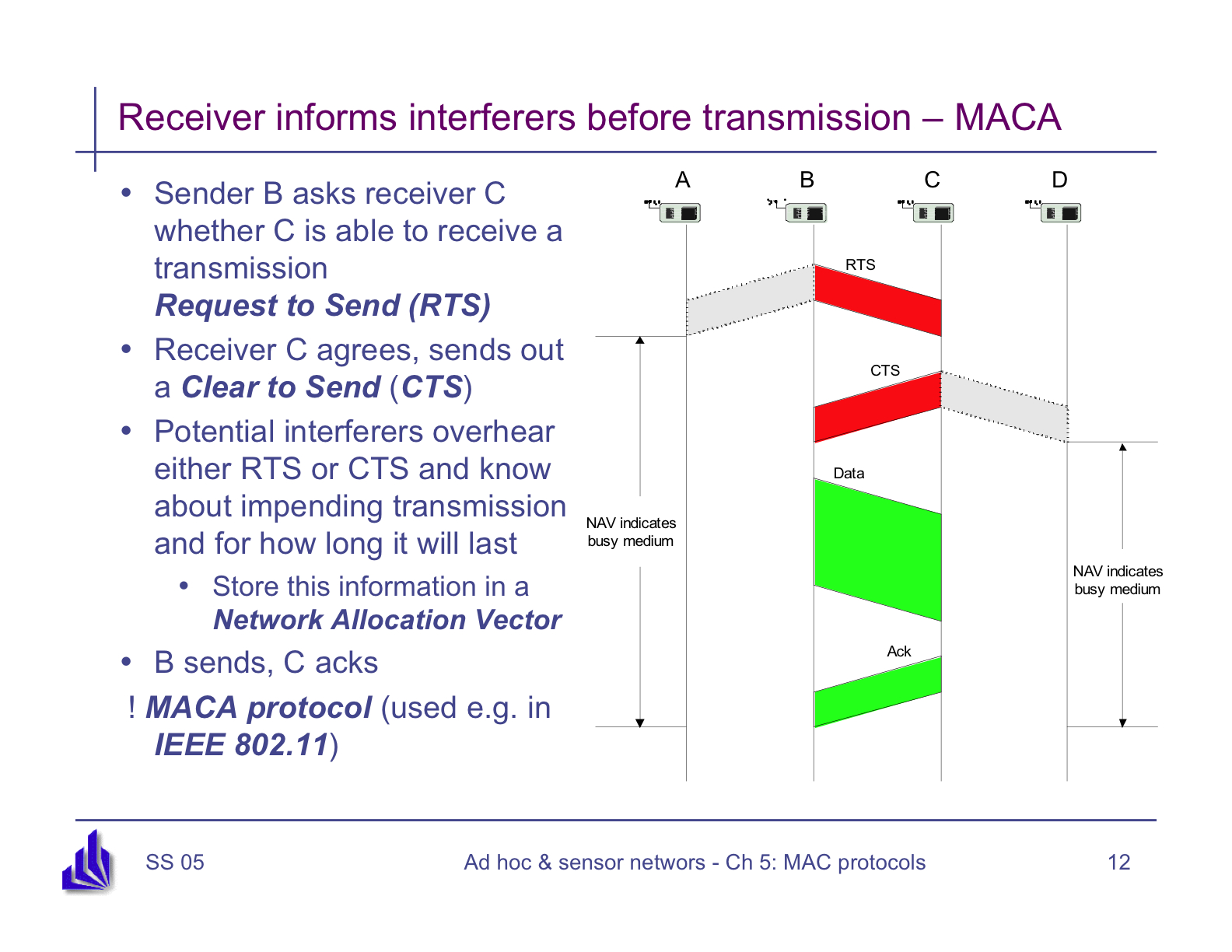
- RTS/CTS (used in 802.11) - before sending, a node sends a
"Request To Send" packet. If the receiver receives the RTS
correctly, it replies with a "Clear To Send". Any node
hearing the CTS (even if it didn't hear the RTS), knows that the
channel is busy.
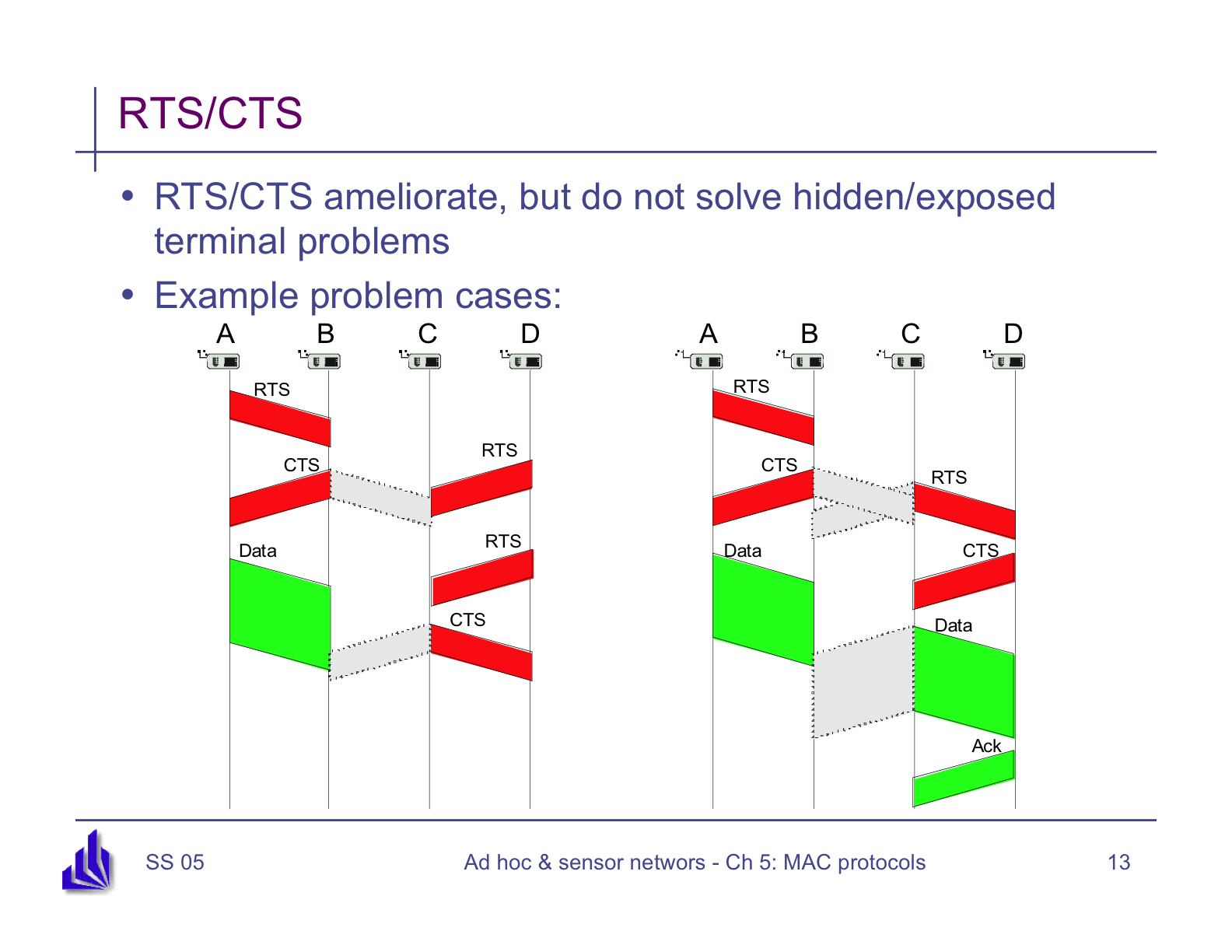
- Problem 1: C cannot decode the CTS from B to determine the
duration of the exchange because of collision with RTS from D. C
does not know how long transmission will be and replies to second RTS
from D causing a collision.
- Problem 2: C cannot decode B's CTS and, upon receiving CTS from D, sends data causing collision at B.
- Solution: Ensure CTS packets are longer than RTS packets. C
is guaranteed to sense B's CTS after it finishes its RTS and will not
send data. Also, in such case C must defer transmission for time
to send 1 max-length data packet.
Common Solutions: Duty Cycling
- Idea: avoid spending time in idle state (either radio or entire node) by periodically sleeping/turning off.
- Duty cycle: ratio of listen period to (listen+sleep period)
- Small duty cycle - sleep most of the time, conserve energy, BUT increased latency for message delivery
Example: S-MAC (Ye, Heidemann, Estrin)
- Goal: reduce energy consumption, support good scalability and collision avoidance
- Periodic listen and sleep - duty cycle is 50%, sleep for .5 seconds, listen for .5 seconds (time determined by app)
- To talk to a node, wait until it is awake and use RTS/CTS before sending message
- Nodes attempt to maintain same schedule as neighbors
- Each maintains a schedule table that store schedule of known neighbors
- To choose schedule:
- Wait for certain time period. If no schedule heard,
randomly choose a time to sleep and broadcast. Broadcasting node
becomes synchronizer.
- If schedule received during waiting period, node becomes a follower and will set its schedule to be the same. Wait for random delay and rebroadcast.
- In rare cases, a node may hear two schedules and adopt both.
- Times exchanged are relative (e.g., I will go to sleep in .25 seconds).
- Listen period must be greater than clock error/drift to ensure lack of time synchronization isn't a significant problem.
- Still, periodic resync is necessary. Nodes periodically
resend a SYNC packet indicating time of next sleep and receivers adjust
time accordingly.
- Listen period - divided into SYNC portion and RTS portion.
During SYNC portion, nodes listen for SYNC messages. During
RTS portion, nodes listen for RTS messages and reply with CTS when
appropriate. Data transmission follows.
- Collision avoidance - before sending a SYNC or RTS packet, the
sender senses the medium for a random amount of time. If no
traffic is heard, it transmits.
- Overhearing avoidance - nodes may sleep after hearing RTS/CTS
sequence. The assumption is that this saves energy since data
packets are longer and nodes will avoid hearing data packets destined
for other nodes.
Example: LEACH (Heinzelman, Chandrakasan, Balakrishnan)
- Goal: distribute energy burden of scheduling communication across all nodes.
- Idea: network is partitioned into clusters. Each cluster
has a clusterhead that schedules communication, receives data, and
reports data to the base station.
- Advertisement Phase: each round. each node decides whether to be
a clusterhead, based on a preconfigured suggested percentage of
clusterheads (5%) and the number of times the node has served as
clusterhead, and sends an advertisement. Using received signal
strength (RSSI), nodes decide which clusterhead to join. A CSMA
protocol is used for this communication.
- Cluster Set-up Phase: nodes use CSMA to join a cluster by informing the clusterhead of their decisions.
- Schedule Creation: The clusterhead uses TDMA to schedule times for each node in the cluster to transmit.
- Data Transmission: nodes send data during their allocated times.
Nodes can turn off their radios when not transmitting. The
clusterhead must remain on during the entire phase. Once the
clusterhead has received data from all nodes, it aggregate the data and
forwards it to the base station.
- Multiple Clusters: to avoid collisions, each clusterhead chooses a CDMA code for the cluster.
Sami
Rollins
Date: 2008-04-18